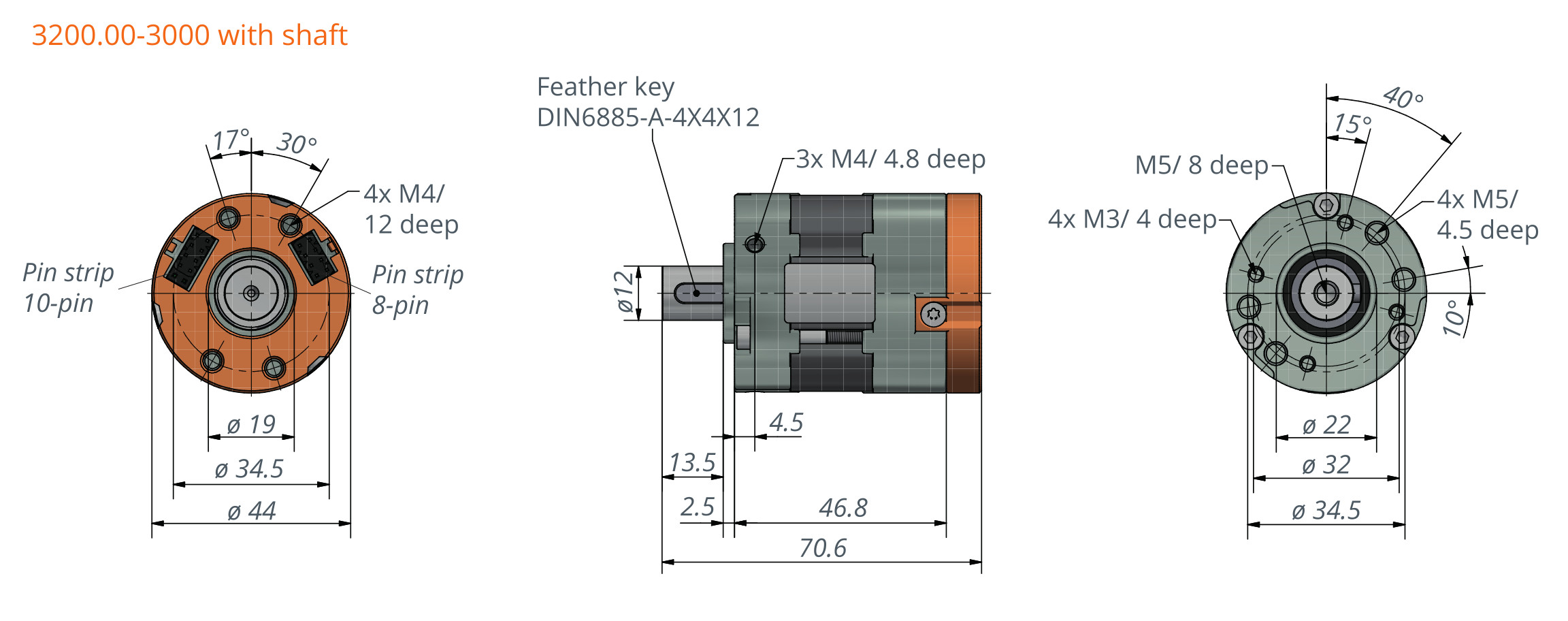

t-Rex 3200 I-44-47-L41 S2 (short version, focus on torque)
Description
14-pole BLDC motor with high-performance neodymium magnets and three digital Hall sensors to detect the rotor position. The electrical connections are designed as a plug-in system. Additional power electronics are required to operate the motor. Motor design with a hollow shaft is also available upon request. This allows the implementation of output on both sides.
Special features
- Designed with focus on torque
- Enormous performance density – 3 times stronger than motors of comparable size
- High overload resistance
- Ideally suited as direct drive, or generator for gearless applications
- Special winding upon request
- Design and manufacture of motor to specified operating point is possible
| t-Rex 3200-I-44-47 L41 S2 DH | 3200.00-3000 |
||
| Shop | |||
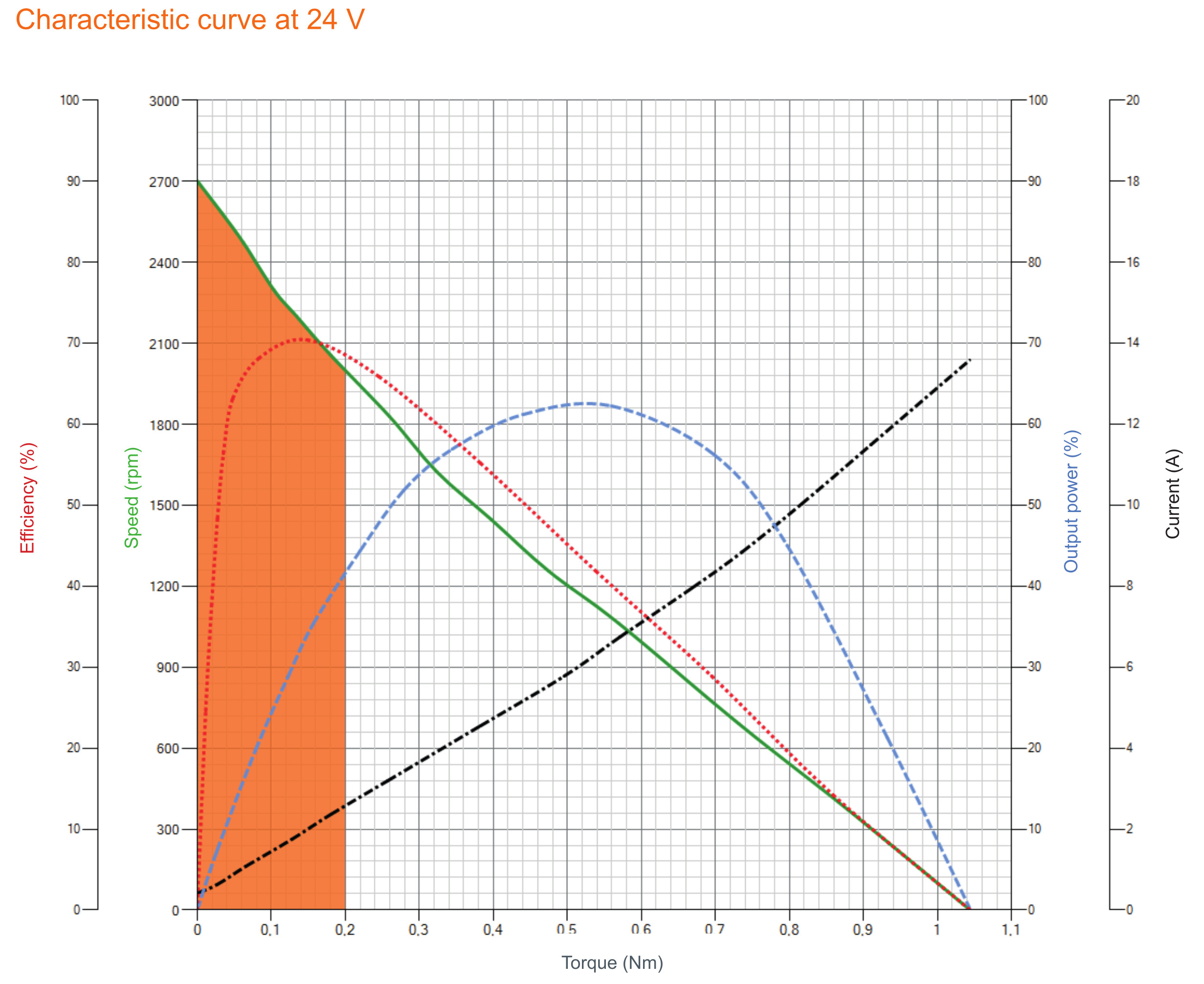
| Rated voltage | 24 VDC | 36 VDC | 48 VDC |
| Rated current | 2.6 A | 2.4 A | 2.2 A |
| Rated torque | 0.2 Nm | 0.2 Nm | 0.15 Nm |
| Rated speed | 2000 rpm | 3250 rpm | 4664 rpm |
| Shaft power (output) | 41 W | 62 W | 74 W |
| Max. efficiency | 70 % | 72 % | 72 % |
| Idle speed | 2700 rpm | 4090 rpm | 5480 rpm |
| No-load current | 0.4 A | 0.45 A | 0.45 A |
| Stall torque | 1.0 Nm | 1.3 Nm | 1.5 Nm |
| Starting current at idle speed | 14 A | 18 A | 20 A |
| Torque constant | 0.077 Nm/A | 0.073 Nm/A | 0.073 Nm/A |
| Speed constant | 113 rpm/V | 114 rpm/V | 114 rpm/V |
| Motor parameters | |
| Terminal resistance (phase to phase) | 1.09 Ohm |
| Terminal inductance (phase to phase) | 98 µH |
| Rotor inertia | 125 kg* mm² |
| Number of poles | 14 |
| Interconnection of the motor | Star |
| Number of coils per phase | 2 |
| Interconnection of coils | 2 Series |
| Direction of rotation | bidirectional |
Note:
Max. ambient temperature = 40 °C, controller-specific
At the nominal point (TU = 20°C), controller-specific
t-rex-i-44-47-l41_s2_3200.00-3000-24v-en.pdf
t-rex-i-44-47-l41_s2_3200.00-3000-36v-en.pdf
t-rex-i-44-47-l41_s2_3200.00-3000-48v-en.pdf
3D data (in STEP format) is saved as a zip file on your computer. After unpacking the files, you can open and view the data with an STP viewer (e.g. the free Autodesk Viewer). To download our 3D data, you have to log into your customer account. If you do not yet have a customer account, you can register now.